ከ MPU-6050 ጋር አፈፃፀም ማመቻቸት - ማዋቀር, መለካት እና መተግበሪያዎች
2024-04-25
9239
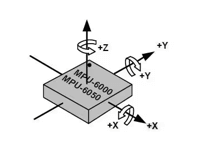
MPU-6050 የ 3-ዘንግ ኢግሮስኮፕስ, ባለ 3-ዘንግስ አፋሽና እና የተስተካከለ ዲጂታል እንቅስቃሴ ንድፍ የሚያዋወቀው የአለም የመጀመሪያ የተቀናጀ 6-ዘንግ የእንቅስቃሴ ማቀነባበሪያ አካላት (DMPINE).የመጠቀም ዓላማው የሚለካውን ዓላማ (እንደ ዱአክኮፕ, ሚዛን, ሚዛን መኪና,, እና z መጥረቢያ), ማለትም, የፓይድ ማእዘን, ማለትም, አንግል ማለት ነው.የ MPU-6050 (ባለ ሶስት ዘንግ የማስታወቂያ እሴት እና ሶስት ዘንግ Loxial Manculation የማስታወቂያ እሴት እናነባለን) በ I2c በይነገጽ በኩል.የፋሽን ማቀነባበሪያ, ፓውሉ, ጥቅልል, እና ያሪ አንጓዎች ሊሰሉ ይችላሉ.የመለኪያ እሴቶችን የመርቀቂያ ማጣቀሻ እንደ አቅጣጫ ማጣቀሻነት መመሪያው የቀኝ እጅ አስተባባሪ ስርዓት (ማለትም, የቀኝ አውራ ጣት አወንታዊ አቅጣጫዎችን የሚከተል)ዘንግ, የመረጃ ጠቋሚ የ y- ዘንግ የአዎንታዊ አቅጣጫ, እና የመሃል ጣት የአዎንታዊ አቅጣጫ አወንታዊ አቅጣጫዎችን ያመለክታል.
ካታሎግ
ከወሰኑ I2C አነፍናቆት አውቶቡስ ጋር MPU-6050 ሙሉ የ 9 ዲሲስ እንቅስቃሴን በማቅረብ በቀጥታ ከውጭ ባለ 3-ዘንግ ኮምፓስ በቀጥታ ግቤት መቀበል ይችላል.ከተዋሃዱ የጊስትሮስኮፕ እና አፋጣኝ የጊዜ መስመር መካከል ያለውን ልዩነት ያስወግዳል እናም ከብዙ አካላት መፍትሔዎች ጋር ሲነፃፀር የማሸጊያ ቦታን በከፍተኛ ሁኔታ ይቀንሳል.ከሶስት-ዘንግ ማግኔቲኖሜትር ጋር ሲገናኙ MPU-60x0 ወደ ዋናው i2c ወይም SPI ወደብ ሙሉ በሙሉ የ 9-ዘንግ (ስፒአይ ወደብ ውስጥ ብቻ የመቅረብ ችሎታ ያለው (SPI ፖርት በሚገኘው ላይ ይገኛል).
አማራጮች እና ተመጣጣኝነቶች
- - AIS328dqtr
- - ICM-20689
- - MPU-3300
- - MPU-6000
- - MPU-6500
MPU-6050 አምራች
የ MPU-6050 አምራች TDK ነው.ከሁለቱ የቲክ መሥራቾች በኋላ ዶክተር ዮጎሮ ካቶ እና ካቲ ሪኒስ በቶኪዮ የተፈለገውን የፍሬሚት ክሬሚድ, ቶኪዮ ዴክኪሱኪ ኮጊዮ ኪዩ.እ.ኤ.አ. በ 1935 ዓለም አቀፍ የኤሌክትሮኒክስ ኢንዱስትሪ አምራች እንደመሆኗ መጠን TDK በኤሌክትሮኒክ ጥሬ ዕቃዎች እና በኤሌክትሮኒክ አካላት መስክ ውስጥ ትልቅ ቦታን ይይዛል.የ TDK የተሟላ እና የፈጠራ ምርታማነት / ፖርትቪስ / ፖርትፖሊየስ, የአሉሚኒየም ኤሌክትሮኒክስ ቁጥጥር, ከፍተኛ ድግግሞሽ እና የመከላከያ መሣሪያዎች, እንዲሁም ዳሳሾች እና ዳሳሽ ዘዴዎች, እንደ ሙቀት እና የሙቀት መጠን,መግነጢሳዊ እና ሜትስ ዳሳሾች, ወዘተ. በተጨማሪም TDK የኃይል አቅርቦቶችን እና የኃይል መሳሪያዎችን, መግነጢሳዊ ጭንቅላቶችን እና ሌሎች ምርቶችን ይሰጣል.የምርት ምርቶች TDK, EPCOS, Inventoden, MICROS, TRONASES እና TDK-ላ eddd ን ያካትታሉ.
የ MPU-6050 የውስጥ ማገጃ

ከነዚህ መካከል SCL እና SDA ከ MCO ጋር የተዛመዱ ኢሲ ኢ-መገልገያዎች ናቸው, እና ከ MCUS እና MCU ጋር MPU-6050 በይነገጽ ይቆጣጠሩ.እንዲሁም ኢሲ በይነገጽ አለ, ማለትም አዩሲ_CL እና AUUX_DA.ይህ በይነገጽ እንደ ዘጠኝ ዘንቢስ ዳሳሽ ለመመስረት እንደ መግነጢሳዊ የባሪያ መሳሪያዎችን ለማገናኘት ሊያገለግል ይችላል.ቪሎሎክ የ IO ወደብ voltage ልቴጅ ነው.ይህ ፒን ቢያንስ 1.8V ን መደገፍ ይችላል.እኛ ብዙውን ጊዜ በቀጥታ ወደ vdd እናገናኛለን.AD0 የባሪያይ II በይነገጽ የአድራሻ መቆጣጠሪያ ፒን ነው (ከ MCU ጋር የተገናኘ).ይህ ፒን የ ICID አድራሻ ዝቅተኛውን ትንሽ ይቆጣጠራል.ከ GND ጋር ከተገናኘ, MPU-6050 II II II IIS 0x68 ነው.ከ VDD ጋር ከተገናኘ, 0x69 ነው.እዚህ ላይ ያለው አድራሻ ዝቅተኛው የውሂብ ስርጭትን አያካትትም (ዝቅተኛው ቢት ስራን ለማነበብ እና ለመፃፍ የሚያገለግል ነው).እ.ኤ.አ. በ MwbaLASDSD15 ላይ AD0 ከ GND ጋር የተገናኘ ነው, ስለሆነም MPU-6050 II II IIS 0x68 (ዝቅተኛውን ቢት ሳይቀየር).
የ IIS በይነገጽ ያስጀምሩ
MPU-6050 ከ STC15 ጋር ለመግባባት IIY ን ይጠቀማል, ስለሆነም ከ MPU ጋር የተገናኙትን የ SDA እና የ SCL የውሂብ መስመሮችን ማስጀመር አለብን.
MPU-6050 ዳግም ያስጀምሩ
ይህ እርምጃ ከኃይል አስተዳደር ምዝገባ 1 (0x6B) 1 (0x6b) በመፃፍ ይህ እርምጃ በሚገኘው MPU-6050 ወደ ነባሪ እሴቶቻቸው ድረስ ሁሉንም መዝገቦች ይመልሳል.ከተስተካከለ በኋላ የኃይል አስተዳደር ምዝገባ 1 ወደ ነባሪው እሴት (0x40) ተመልሷል.
የአንዱን የአንጃራዊ ፍጥነት ዳሰሳ (ጋሮ) እና የተፋጠነ ዳሳሽ
በዚህ ደረጃ በ geroscoce ውቅር ውቅር ምዝገባ (0x1b) እና በአፋጣኝ የመረጃ ውቅር (0x1c) በአደገኛ የፍጥነት አነቃቂ ውቅር ምዝገባ (0x1C).በተለምዶ, የሙሉ ደረጃ የጂሮስኮኮፕ መጠን ወደ ± 2000 ዲ.ፒ. እና የፍጥነት መለኪያ እስከ ± 2 ግ ድረስ ሙሉ በሙሉ ደረጃዎችን እናቀምጣለን.
ሌሎች መለኪያዎች ያዘጋጁ
እዚህ ደግሞ የሚከተሉትን መለኪያዎች ማዋቀር አለብን, አቋርጦቹን ያጥፉ, አቋርጦቹን ያጥፉ, ዩ.አይ.ቪ.በዚህ ምዕራፍ ውስጥ ውሂብን ለማንበብ አቋርጦችን አንጠቀምም, የመቋረጡ ተግባሩ መቋረጡን ማጥቃት አለበት.በተመሳሳይ ጊዜ ሌሎች ውጫዊ ዳሳሾችን ለማገናኘት የ Aux I2c በይነገጽ ስላልጠቀምብን እኛ ደግሞ ይህንን በይነገጽ መዝጋት አለብን.እነዚህ ተግባራት በማግኘቱ ሊቆጣጠሩት ይችላሉ ምዝገባ (0x38) እና የተጠቃሚ ቁጥጥር ምዝገባ (0x6A).MPU-6050 የሙከራ መረጃን ለማከማቸት (ኤም.ኤ.) ሊጠቀም ይችላል, ግን በዚህ ምዕራፍ ውስጥ አልተጠቀምንም, ስለዚህ ሁሉም የፎን ሰርጦች መዘጋት አለባቸው.ይህ በ FIFO ሊቆጣጠር ይችላል FIF ምዝገባ (0x23).በነባሪነት የዚህ ምዝገባ ዋጋ 0 (ማለትም ማለትም, አምሳ ነው), ስለዚህ ነባሪውን እሴት በቀጥታ መጠቀም እንችላለን.የጂርሮስኮፕ መወጣጫ ፍጥነት በናሙና የተሽከረከር አሰጣጥ ምዝገባ (0x19) ቁጥጥር ይደረግበታል.በተለምዶ ይህንን ናሙና ተመን ወደ 50 ዶላር እናስቀምጣለን. የዲጂታል ዝቅተኛ-ማለፊያ ማጣሪያ (DLPF) በማዋቀሩ መዝገብ (0x1A) በኩል ተጠናቅቋል.በአጠቃላይ, የመረጃ ትክክለኛነት እና የምላሽ ፍጥነትን ሚዛን ለመጠበቅ DLPF ወደ ግማሽ ባንድዊድደር እናስቀምጣለን.
የስርዓት ሰዓቱን ምንጭ ያዋቅሩ እና የአልኮል ፍጥነት አነቃፊ ዳተንት እና የፍጥነት መረጃ አነቃ
የስርዓት ሰዓቱ ምንጭ መቼት የኃይል አስተዳደር ምዝገባ 1 (0x6b) ላይ የሚወሰነው የዚህ የክፍያ ምንጭ ምርጫን የሚወስኑበት በዚህ ምዝገባ ውስጥ ነው.በነባሪነት እነዚህ ሶስት መከለያዎች ወደ 0 ተዋቅረዋል, ይህም ማለት ስርዓቱ እንደ የሰዓት ምንጭ ሆኖ ውስጣዊው 8MHZ RC ኦስተሮችን ይጠቀማል.ሆኖም የሰዓት ትክክለኛነትን ለማሻሻል ብዙውን ጊዜ ወደ 1 እናስቀምጣለን እና የ X-arxis eroscocope Plel እንደ የሰዓት ምንጭ እንመርጣለን.በተጨማሪም, የመንገድ ፍጥነት አነፋፊ እና የፍጥነት መቆጣጠሪያ ዳሳሽ ማስነሳት እንዲሁ በመነሻ ሂደት ውስጥ አስፈላጊ እርምጃ ነው.ሁለቱም ክወናዎች በኃይል አስተዳደር ምዝገባ 2 (0x6C) ይተገበራሉ.በቀላሉ ተጓዳኝ ዳሳሽ ለመክፈት ተጓዳኝ bit ን ትንሽ ወደ 0 ያዘጋጁ.MPU-6050 ከላይ የተጠቀሱትን እርምጃዎች ካጠናቀቁ በኋላ ወደ መደበኛ የሥራ ሁኔታ ሊገባ ይችላል.በተለይ የተመዘገቡት የተመዘገቡ እነዚህ ሪኮርዶች ነባሪ እሴቶችን ቅድመ ዝግጅት በስርዓቱ ያካሂዳሉ.
MPU-6050 ሥራ እንዴት ነው?
ጊሮ ዳሳሽ
አነፍናፊው በጋሽሮፒኮፒኮፕ ውጤት ምክንያት ሁል ጊዜ ከመጀመሪያው አቅጣጫ ጋር ትይዩ የሚኖር ሲሆን ሁል ጊዜም ትይዩ ይሆናል.ስለዚህ, የመነሻውን አቅጣጫ የመነሻውን መቆጣጠሪያ በማወቅ አቅጣጫውን የመዞሪያ አቅጣጫ እና ማእዘን ማስላት እንችላለን.
የፍጥነት መለኪያ ዳሳሽ
የፍጥነት መለኪያ ዳሳሽ መረጃ ማፋጠን እና በፓይዞይድ ግፊት መርህ ላይ የተመሠረተ መሣሪያ ነው.በተፋቱ ወቅት ዳሳሽ ግንዛቤው በጅምላ ማገጃ ላይ የተተገበረ የመነሻ ኃይል ይለካዋል እናም የኒውተን ሁለተኛ ህግ በመጠቀም የተፋጠነ እሴት ያሰላል.
ዲጂታል እንቅስቃሴ እንቅስቃሴ (DMP)
ከ groscocop እና Felederorter ዳሳሾች ውስጥ ውሂብን ለማግኘት አብሮ የተሰራው ቺፕስ (DPP) DPPA የሚሰራው የመረጃ ማቀነባበሪያ ሞዱል ነው.ይህ ባህርይ የአጭበርባሪ ማይክሮ ፕሮፌሰስን የሥራ ጫና በእጅጉ ይቀንሳል እናም አድካሚ የማጣሪያ እና የውሂብ ቀዳሚ ሂደቱን ያስወግዳል.
ማስታወሻዎች
ድርጅቶች: - ድርጅቶች ቀላል ሱ Super ርኮክ ቁጥሮች ናቸው.ውስብስብ ቁጥሮች እኔ እውነተኛ ቁጥሮችን እና የት እንደሆንኩ በአዕምሯዊ አሃድ የተገነቡ ናቸው, ^ 2 = 1.
MPU-6050 ጥቅም ላይ ውሏል?
- አሻንጉሊቶች
- የጆሮ ማዳመጫ እና ተንቀሳቃሽ ጨዋታ
- በእንቅስቃሴ ላይ የተመሰረቱ የጨዋታ ተቆጣጣሪዎች
- Blurfree ™ ቴክኖሎጂ (ለቪዲዮ / አሁንም የምስል ማረጋጊያ)
- የሃርስግ ™ ቴክኖሎጂ (ለፀጥታ / ማረጋገጫ)
- የፈጸመው ™ ig ™ የእጅ ምልክቱ እውቅና መስጠት
- ለጤና, የአካል ብቃት እና ለስፖርቶች ያልተለመዱ ዳሳሾች
- እንቅስቃሴ-የነቃ የጨዋታ እና የማመልከቻ ማዕቀፍ
- MoveTommandand ™ ቴክኖሎጂ (ለእርስዎ የምልክት አጫጭር ቁራጭ)
- በአከባቢ ላይ የተመሠረተ አገልግሎቶች, የፍላጎት ነጥቦች እና የሞተ መገምገም
- በይነመረብ ጋር የተገናኙ የ 3 ዲ የርቀት መቆጣጠሪያዎች, ከፍተኛ ሳጥኖች, 3 ዲ አይጦች ያዘጋጁ
- እነዚያ የ ™ ቴክኖሎጂዎች (የ UI ትግበራ መቆጣጠሪያ / አሰሳ)
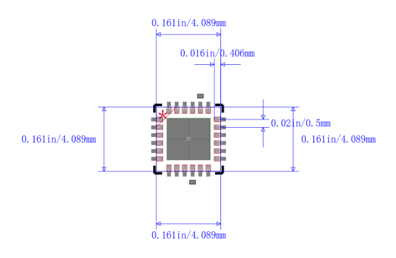
የ MPU-6050 ጥቅል
የ MPU-6050 ጫጫታ ለመቀነስ እንዴት እንደሚቻል?
የ MPU-6050 ጫጫታ ለመቀነስ የሚከተሉትን መንገዶች መውሰድ እንችላለን.
የተስተካከሉ ዳሳሾች ይጠቀሙ
የ MPU-6050 የፍጥነት መለኪያዎች እና ግዙፍ ማካካሻ የ MEPU-6050 አድማጭነት እና የመነበያየስ አድማጮቹን እና የስህተት ስሕተት ራሳቸውን ማስወገድ ይችላሉ, እናም የጩኸቶችን ውጤት ይቀንሱ.የመለኪያ ሂደት ብዙውን ጊዜ ሁለት ደረጃዎችን ያቀፈ ነው-የማይንቀሳቀስ መለዋወጫ እና የእንቅስቃሴ መለካት.
የሃርድዌር ማጣሪያ ሂደት
የማጣሪያ ችሎታዎችን የማጣራት ችሎታዎችን ለማከል MPU-6050 የኃይል መስመር (MPUUS-6050) የማጣሪያ መስመር ላይ የማካሄድ አቅም በሙያው ላይ የኃይል አቅርቦትን ጫጫታ እንዲቀንስ ይችላል.ይህ በእንዲህ እንዳለ, በ PCB አቀማመጥ ወቅት, እንደ ከፍተኛ ድግግሞሽ የምልክት መስመሮች እና ከፍተኛ የኃይል አካላት ያሉ የመግቢያ ምንጮች ከሚያስከትሉ የመግቢያ ምንጮች ጋር ለማቆየት መሞከር አለብን.
የሶፍትዌር ማጣሪያ ሂደት
ከ MPU-6050 ጥሬ ውሂቡን ጥሬ ውሂቡን ከተሰበሰቡ በኋላ የዲዲቨር-ጩኸት ጣልቃ-ገብነትን ለማስወገድ የመጀመሪያውን ውሂብ ከቅድመ-ማከናወን የፍትተኛ ማጣሪያ አገናኝ ማከል እንችላለን.በብዛት ጥቅም ላይ የዋሉ የሶፍትዌር ማጣሪያ ዘዴዎች ማለት አማካኝ ማጣሪያ, መካከለኛ የማጣሪያ, Kalman ማጣሪያ እና የመሳሰሉትን ያካትታሉ.
የውስጥ ዝቅተኛ-ማለፊያ ማጣሪያ ይጠቀሙ
MPU-6050 የተቆራረጠውን ድግግሞሽ በማቀናበር ከፍተኛ ድግግሞሽ ጫጫታ ለመቀነስ ሊያገለግል የሚችል ውስጣዊ የተዋሃደ ዲጂታል አነስተኛ-ማለፊያ ማጣሪያ አለው.በተለይም, የ A / D ናሙና ምክንያት የተፈጠሩትን ከፍተኛ ድግግሞሽ ጫጫታ ለማሻሻል የዲጂታል ማጣሪያ ድግግሞሽ የዲጂታል ማጣሪያ ድግግሞሽ ማዘጋጀት እንችላለን.
MPU-6050-ተኮር የእንቅስቃሴ ትራክ ስሌት
MPU-6050 የነገሮችን እንቅስቃሴ ለመለካት እና የአመለካከት እንቅስቃሴ ለመለካት ሊያገለግሉ የሚችሉ ስድስት ዘመናዊ ማኅደረፊያ እና የጊሮኮፕ ዳሳሽ ነው.MPU-6050 ላይ በመመርኮዝ የእንቅስቃሴው ተጓዳኝ ስሌት በሚቀጥሉት ደረጃዎች ሊከናወን ይችላል-
የመጀመሪያው እርምጃ የፍተሻ ውሂቡን ማንበብ ነው.አግባብ ያላቸው አሽከርካሪዎች እና የቤተ መፃህፍት ተግባራት በመጠቀም ከ MPU-6050 ዳሳሾች ውስጥ የፍጥነት መለኪያ እና የጊስትሮስኮፕ ውሂብን ማንበብ አለብን.እነዚህ መረጃዎች ብዙውን ጊዜ በዲጂታል ቅርጸት ውስጥ ውፅዓት ናቸው, ስለሆነም አንዳንድ ልወጣ እና መለካት ሥራ በአካላዊ ክፍሎች ውስጥ ወደ ትክክለኛ ልኬቶች መለወጥ አለበት.
ሁለተኛው እርምጃ ማፋጠን ነው.በመጀመሪያ, በእያንዳንዱ ዘንግ ውስጥ የነገሩን ማፋጠን ለማጎልበት ከድድሜሽኑ ውሂብን ማካሄድ አለብን.በቀጣዩ በእያንዳንዱ ዘንግ ውስጥ የነገሩን ፍጥነት እና መፈናቀሉ ለማስላት, የተፋጠነ ውሂብን ማዋሃድ አለብን.እንደ ደም ሰጪ ዘዴ ወይም የሳንባ-ኮትታ ዘዴ ያሉ የቁጥር ውህደት ቴክኒኮች ብዙውን ጊዜ በዚህ ሂደት ውስጥ የሚከናወኑ ናቸው.
ሦስተኛው እርምጃ የግድግዳዎን ፍጥነት ማስላት ነው.የጊሮኮኮፕ ውሂብን በመጠቀም በእያንዳንዱ ዘንግ ውስጥ ያለው የነገሩን አንግል ፍጥነት ሊሰላ ይችላል.እንደገና, ይህ መረጃ በእውነተኛ የአካል ክፍሎች ውስጥ ያለውን ፍጥነት ለማግኘት መሰናከል እና መቀየር አለበት.
አራተኛው እርምጃ ማሽከርከሩን ለማስላት ነው.የግድግዳዎን ፍጥነት ውሂብን በማዋሃድ በእያንዳንዱ ዘንግ ውስጥ የነገሩን የማሽከርከር ማእዘን ይሰላል.ይህ ሊከናወን ይችላል, የመሳሰሉ ዘዴን ወይም የሱፍ-የኪታታ ዘዴን አንግል ለማስላት.
አምስተኛው እርምጃ ውሂቡን ማዋሃድ ነው.የተሟላ የአመለካከት እና የቦታ መረጃ ለማግኘት ከድድ ሜዳሮች እና ከግስሮስኮፕስ መረጃዎች እናጣመርዋለን.ይህ ሊከናወን ሊችል የሚችለው እንደ "እንደ" የመጥፋት የተመሰረተ - ሰሊቨር ወይም Enler or light Angle Suver ያሉ ስልተ ቀመሮችን በመጠቀም ሊከናወን ይችላል.
ስድስተኛው እርምጃ ውጤቱን በዓይነ ሕሊናህ ለመሳል ሞክር.የ 3 ል እና የአመለካከት ለውጥ እና የአመለካከት ለውጥ ተጨማሪ ግላዊነትን በተመለከተ የተካተተውን የነገር እንቅስቃሴ ወደ ነጥቦችን ወደ ነጥቦችን ወደ ስብስብ እናቀላለን.
ተዘውትረው የሚጠየቁ ጥያቄዎች [ተዘውትረው የሚጠየቁ ጥያቄዎች]
1. MPU6050 ምን ያህል ነው?
የተገኙት ውጤቶች ከ 1% በታች የሆነ የመሳሪያ ዘንግ እና የአድራሻ ኢንዱስትሪ ከፍተኛ ደረጃዎች ተገቢውን የመረጃ ደረጃዎችን ማረጋገጥ ከ 1% በታች እና አስተማማኝነት በቂ ትክክለኛነት አሳይተዋል.
2. ውሂብን ከ MPU6050 እንዴት እንደሚነበብ?
ውስጣዊ MPU6050202020ዛዥ መዝግቦቹን ለማንበብ የመጀመሪያውን ሁኔታ ይልካል, የተከተለው የ I2c የባሪያ አድራሻ እና ፃፍ ቢት, እና ከዚያ ሊነበብ የሚችል የመመዝገቢያ አድራሻ ነው.
3. MPU605050 የሚሆነው ጥቅም ላይ ውሏል?
በጤና መከታተያ, የአካል ብቃት መከታተያ መሣሪያዎች ውስጥ.በአውሮፓዎች እና በኩፋዮች, MPU605050 ለ Sport ቁጥጥር ጥቅም ላይ ይውላል.የሮቦቲክ ክንድ ለመቆጣጠር ያገለግል ነበር.የእጅ ምልክት ቁጥጥር መሣሪያዎች.
4. MPU60505050 ነው?
MPU60505050505050505050505050 ከሃርድዌር ጋር የተገናኘ ከ MPU-6050 ዳሳሽ ውሂብ ያነባል.ማገጃው ማፋጠን, ማደንዘዣ ደረጃ, እና በሙያው ዘረኞች ላይ የሙቀት መጠን.
5. MPU6050 ዎቹ ማካሄድ ምንድነው?
ይህ ከድድ መቆጣጠሪያ እና ከግድሮኮፕ የመጡትን መረጃ የሚያጣምሩ የውሂብ ዎርድዶስ ይህ ነው.የ MPU6050 ን ለመጠቀም ቁልፉ ቁልፍ ነው እና በኋላ በዝርዝር ተብራርቷል.እንደ ሁሉም የማይክሮሶንቶች ሁሉ እንዲሮጡ የ DMP ፍላጎቶች ጽኑ አጥር.
የተግባር ፈተና.ከፍተኛ ወጪ ቆጣሪዎች ምርቶች እና ምርጥ አገልግሎት ዘላለማዊ ቁርጠኝነት ነው.
የሙቅ ጽሑፍ
- CR2032 እና CR2016 ተለዋዋጭነት ያላቸው ናቸው
- Mosefet: - ትርጉም, የሥራ መርህ እና ምርጫ
- የተዘበራረቀ የመጫን እና የሙከራ ትርጉም, የመጫኛ የሽቦ ሥዕላዊ መግለጫዎች
- CR2016 VS D2032 ልዩነቱ ምንድነው?
- NPN VS. Pnp: ልዩነቱ ምንድነው?
- esp32 VS STM32: የትኛው Microcontrover ለእርስዎ የተሻለ ነው?
- LM358 ባለሁለት የሥራ አፈፃፀም አከባቢ አጠቃላይ መመሪያ-ስፒውስ, የወረዳ ሥዕላዊ መግለጫዎች, ዋጋዎች, ጠቃሚ ምሳሌዎች
- CR2032 VS DL2032 VS CRA2025 ንፅፅር መመሪያ
- ልዩነቶችን መረዳቱ ESP32 እና ESP32-S3 ቴክኒካዊ እና የአፈፃፀም ትንተና
- የ RC ተከታታይ ወረዳ ዝርዝር ትንታኔ
 የ NRF24L01 የግንኙነት ቺፕን መመርመርና ችሎታዎችን መመርመር
የ NRF24L01 የግንኙነት ቺፕን መመርመርና ችሎታዎችን መመርመር
2024-04-25
 Mmbt3904 NPN ትራንዚስተር: - የመለያዎች, አጠቃላይ የመተግበሪያ መመሪያ እና MMBT3904 VS MMBT5551
Mmbt3904 NPN ትራንዚስተር: - የመለያዎች, አጠቃላይ የመተግበሪያ መመሪያ እና MMBT3904 VS MMBT5551
2024-04-25
የሙቅ ክፍል ቁጥር
 GRM155R71H183KA12D
GRM155R71H183KA12D GRM21BR72A153MA01L
GRM21BR72A153MA01L C3225CH2J822K125AA
C3225CH2J822K125AA GRM0225C1E7R8BA03L
GRM0225C1E7R8BA03L 12103C474KAT2A
12103C474KAT2A 08051U101KAT4A
08051U101KAT4A TAP684K035SRW
TAP684K035SRW T350A224K035AS
T350A224K035AS T499C106K010ATE1K8
T499C106K010ATE1K8- T499C335K035ATE2K5
- GN2411BIBE3
- MK26FN2M0VLQ18
- MKE02Z32VLC4
- S908GZ60E1MFAE
- VE-240-CU
- MIC5156-3.3YM
- VI-J44-EY
- VI-B6J-CV
- LM27761DSGT
- LTC6244HVCMS8#TRPBF
- NCV7420D26R2G
- TPS62745DSST
- DS90UB947TRGCRQ1
- T491C107K010ZG
- AD6654XBCZ
- AM29F080B-75EC
- COM78C804
- CY7C199-45VCT
- LTC3862GN
- MAX1991EEI
- ML2215-537MBZ03B
- PEB22554HTV1.3
- RA8820P1N
- RT2660DLGQV
- S29GL032A11TFIR40
- S9S12G128CLF
- TC74LCX00FK
- TEF6730HW/V1D
- TN2022-B0
- TW8823-DALA3-GE
- ALVCH16646
- SDA5273-2P
- XC7445BRX1250RFR
- LM2576TADJ-NOPB
- SI2404-F1
- SUN110N06
- NT6CL256T32CM-H1
- W9825Y2DB751
- XC6SLX25-2FTG256